Archimedes
Interactive computational geometry in Rust + WASM + WebGPU
- Algorithms: Andrew's monotone-chain convex hull, Bowyer-Watson Delaunay triangulation, polygon boolean ops via i_overlay
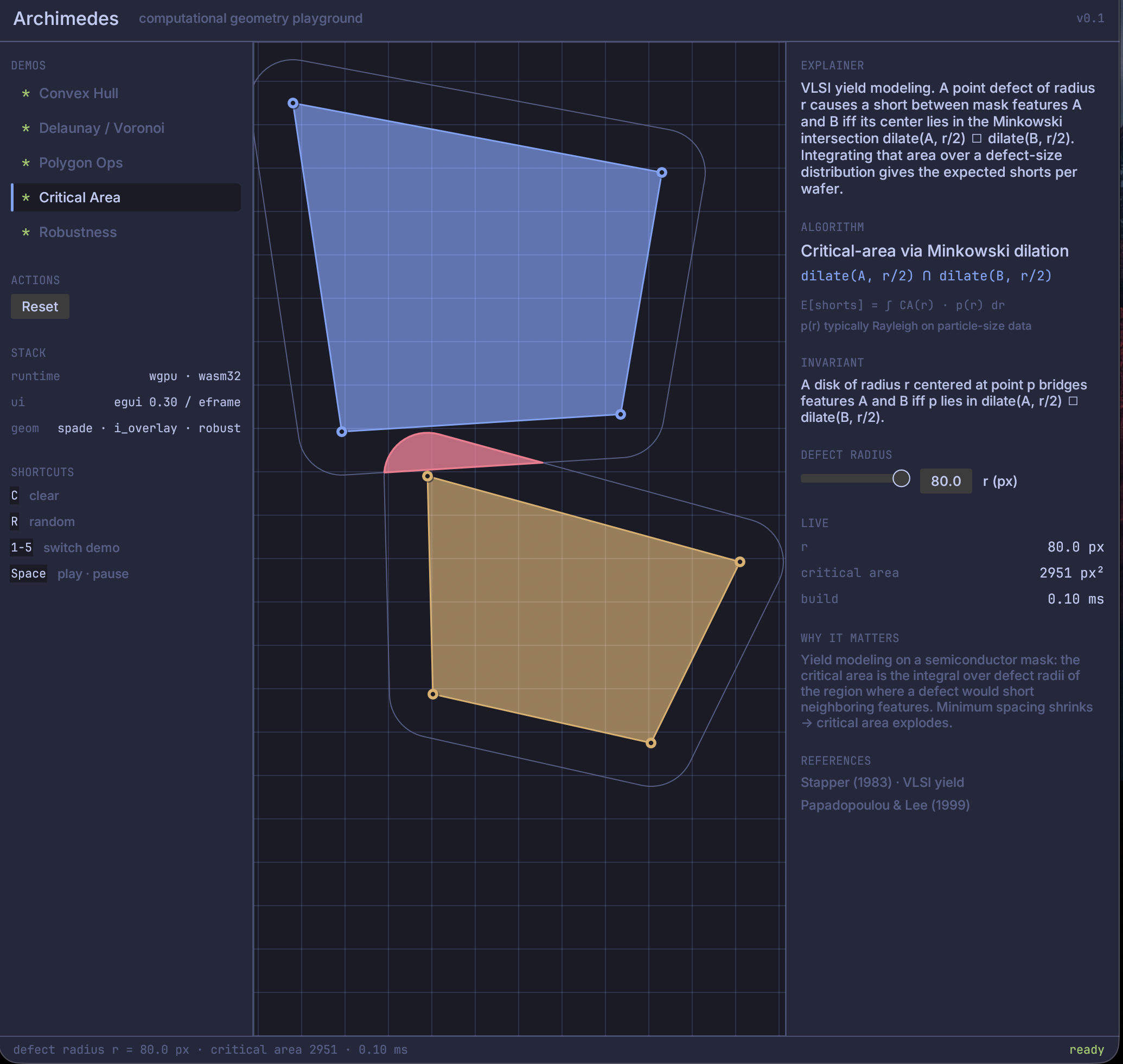
- Semiconductor: Critical-area analysis — Minkowski-style dilation for VLSI yield prediction (Papadopoulou & Lee, 1999)
- Robustness: Side-by-side naive f32 vs Shewchuk adaptive-precision predicates on near-degenerate input
- Stack: egui + wgpu rendering, trunk for wasm build, runs in-browser via WebAssembly
RustWebAssemblyWebGPUeguiComputational Geometry